NVIDIA 自动驾驶实验室:自动驾驶中的动态视角鲁棒性解析
更新时间:2023-12-27 23:43:01作者:xhjaty
汽车制造商正在将自动化和自动驾驶功能整合到车队中,然而当技术扩展到新车型时,会面对新的挑战。例如鸟瞰分割图等感知模型,是使用通过轿车收集的数据而开发的。当其设置在 SUV 上时,由于摄像机视角的明显差异,其准确性会下降。在本期自动驾驶实验室中,将讨论视角的鲁棒性,并介绍 Dynamic View Synthesis 所提供的解决方案。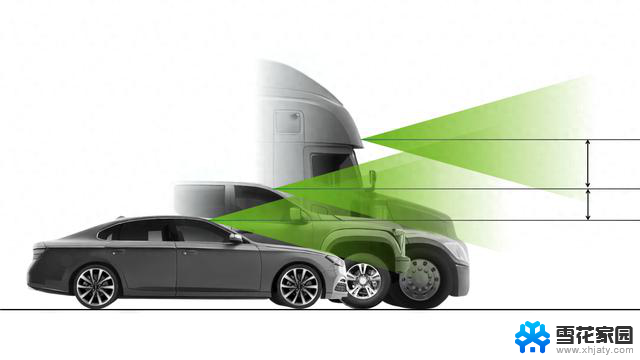
观看本期自动驾驶实验室视频,了解更多信息:
00:00:33
视角鲁棒性及最新解决方案
00:01:34
通过 Dynamic View Synthesis 来消除视角挑战
00:01:51
不同视角之间的多视一致性
00:02:24
神经辐射场 (NeRF) 对视角鲁棒性的效果不佳
00:02:37
训练深度神经网络(DNN)以用于从单一图像估计场景深度
00:03:34
大规模部署感知模型
//
扩展阅读:
《使用合成数据处理自动驾驶新视角感知》
开发能够在不同类型车辆上鲁棒的运行的感知堆栈是一项巨大的数据挑战。而合成数据生成和用于新视角合成(NVS)的 AI 技术能够实现感知灵敏度的系统测量。这大大提高了现有数据集的价值,并缩短了为其他车辆部署感知堆栈的时间。
NVIDIA DRIVE Sim 中的合成数据集以及 NVIDIA 在新视角合成(NVS)方面的最新研究可以帮助填补数据缺口,并帮助在部署新传感器配置时保持感知准确性。以加速各种尺寸和大小自动驾驶汽车的感知算法的训练。
使用合成数据处理自动驾驶新视角感知
NVIDIA DRIVE 相关资源
NVIDIA 自动驾驶实验室:自动驾驶中的动态视角鲁棒性解析相关教程
-
 NVIDIA以90%的份额主导AI GPU市场:行业霸主的实力无可撼动
NVIDIA以90%的份额主导AI GPU市场:行业霸主的实力无可撼动2024-01-30
-
 RTX 4090实测:546.17 VS 522.25版显卡驱动,性能提升是否真实?
RTX 4090实测:546.17 VS 522.25版显卡驱动,性能提升是否真实?2023-11-18
-
 微软发布自研芯片,英伟达黄仁勋为何站台?解析行业合作动机
微软发布自研芯片,英伟达黄仁勋为何站台?解析行业合作动机2023-11-16
-
 中国CPU实现自主可控,事实比你想象的更复杂
中国CPU实现自主可控,事实比你想象的更复杂2023-11-16
系统资讯推荐
- 1 微软自研5000亿参数武器曝光,前谷歌DeepMind高管挑战OpenAI!
- 2 苹果或在今晚发布Apple Pencil Pro,雷军逛完北京车展后感到绝望
- 3 微软疯狂押注AI,焦虑和野心再也藏不住
- 4 次时代显卡的小秘密 这个选项你打开了吗?揭秘最新显卡的黑科技
- 5 Windows 11强制全屏弹窗?力推Edge等应用,用户体验受影响
- 6 下一代Windows要大变革:“真AI PC”要来了,革命性的人工智能电脑即将问世
- 7 NVIDIA ChatRTX聊天机器人支持Google Gemma模型和语音查询功能
- 8 如何修改电脑WIN10、WIN11系统excel、word底色?
- 9 骁龙8gen3 CPU性能接近10代i5 10400?极客湾测评揭晓答案
- 10 大白话告诉你显卡参数都是啥意思,显卡参数解析及选择技巧
win10系统推荐
系统教程推荐
- 1 苹果14搜不到蓝牙耳机怎么办 苹果手机蓝牙搜索不到其他设备怎么处理
- 2 怎样连接打印机与电脑 电脑和打印机如何连接
- 3 屏幕触摸不灵是内屏坏了吗 笔记本触摸板失灵
- 4 怎么禁用cpu核显 Windows电脑如何关闭CPU自带的核显功能
- 5 做好的word文档怎么保存到桌面 word文档保存到桌面步骤
- 6 用hdmi连接电视电脑怎么设置 电脑和电视如何实现HDMI连接
- 7 win10如何删除c盘的垃圾文件 win10系统删除系统更新后的C盘垃圾文件方法
- 8 window电脑录屏快捷键 win10分屏快捷键不起作用
- 9 苹果怎么添加一键锁屏 iPhone一键锁屏的设置步骤
- 10 苹果13pro开机键在哪里 苹果13手机怎么按键开机